Rigid body mechanics
请注意,本文最近一次更新于:2022-03-12,文章内容可能已经不具有时效性,请谨慎参考
本文最后更新于:2022年3月12日星期六晚上6点16分 +08:00
刚体动力学是力学的一个分支,研究刚体在外力作用下的运动规律。它是计算机器部件的运动,舰船、飞机、火箭等航行器的运动以及天体姿态运动的力学基础。
刚体的定义:
_在任何外力的作用下不发生形变的物体_。刚体是理想化的物体。并且可视为由无限多个彼此间距离保持不变的质元组成的质点系。
刚体的运动:
平动:刚体在运动过程中,其上任意两点的连线始终保持平行。(平动没有什么好说的,就可以当做一个质点来进行计算,基本上大家利用高中所学的知识就能够完成平动的计算)
转动:刚体上所有质点都绕同一直线做圆周运动。这种运动称为刚体的转动。这条直线称为转轴。(这部分才是刚体力学的重点,下面的部分讲的就是刚体的转动部分)
接下来讲一下基本的物理量:
$\theta$ :角度( $\Delta\theta$ :在某个时间内转过的角度)
$\omega$ :角速度(假设角度随时间变化的方程是 $\theta(t)$ ,则 $\omega=\frac{d\theta}{dt}$ 就是其对时间的求导)
$\alpha$ :角加速度( $\alpha=\frac{d^{2}\theta}{dt^{2}}$ ,对时间求二次导数)
角速度和角加速度均为矢量,定轴转动中其方向沿转轴的方向并满足右手螺旋法则
1.力矩: $M=r \times F\bot$ (注意这里是两个向量叉乘,我还不清楚知乎怎么打出向量的箭头符号)(这里的力是投影到刚体所在平面内的力,可以根据向量法则进行拆分出来)
大小: $M=r\times F\bot \times sin\theta$ , $\theta$ 是两个向量的夹角
方向:满足右手螺旋法则
单位: $N\cdot m$
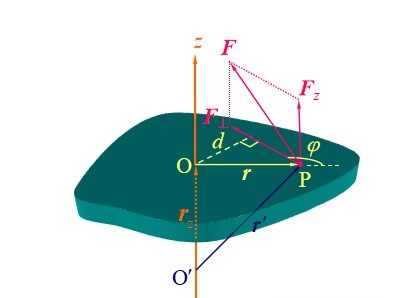
$F\bot$ 在平面内, $F_{z}$ 垂直于刚体所在平面, $F$ 是原本施加的力
2.角动量: $L=\omega\sum_{i=0}^{n}{m_{i} r_{i}^{2}}$
推导过程:因为我们知道平动的物体动量就是 $p=mv$ ,在转动过程中对于刚体中任意一质点的角动量 $L_{i}=m_{i}v_{i}r_{i}$ ,而我们又知道 $v=\omega r$ ,所以 $L_{i}=m_{i}\omega_{i}r_{i}^{2}$ ,而之前就讲过了,我们可以把刚体看成无穷多个质点。所以我们把所有的质点全部加起来就是整个刚体的角动量 $L_{i}=\sum_{i=0}^{n}{m_{i}\omega_{i}r_{i}^{2}}$ ,而同轴转动的物体,角速度相同。所以我们得到了公式: $L=\omega\sum_{i=0}^{n}{m_{i} r_{i}^{2}}$ 。
单位: $N\cdot m\cdot s$
注意事项:角动量是矢量(因为 $\omega$ 和 $r$ 是矢量,乘积出来也是矢量,因为$\omega$ 和 $r$夹角始终是 $\frac{\pi}{2}$ ,所以正弦值等于1对计算没有影响),方向满足右手螺旋法则。
转动惯量:
- $J=\sum_{i=0}^{n}{m_{i} r_{i}^{2}}$
联系:从式子我们就不难看出它与角动量之间的关系 $L_{z}=J_{z}\omega$ (这里的z是转动轴,绕z轴转动的意思)。
注意事项:
(1).刚体的转动惯量与刚体的形状、大小、质量的分布以及转轴的位置有关。 而与刚体的运动状态无关。
(2).对于不规则的刚体,具体计算时可以采用积分等数学方法计算。对于常见的形状,建议大家还是记住其转动惯量是多少。
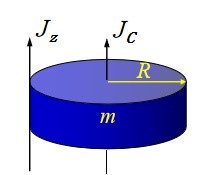
巧算方法:若刚体对一个过质心的轴的转动惯量为 $J_{c}$ ,则刚体对与该轴相距为 $d$ 的平行轴z的转动惯量 $J_{z}$ 是 $J_{z}=J_{c}+md^{2}$ 。这个式子极为重要!!而且一定要记住 $J_{c}$ 的轴一定要过质心。
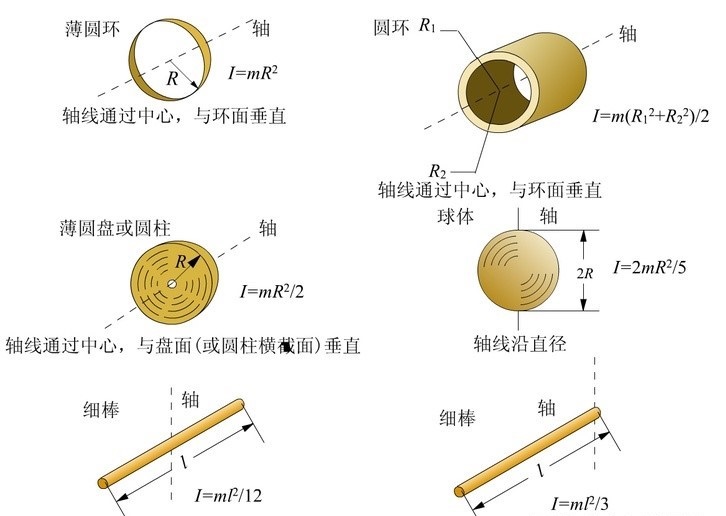
常见物体转动惯量:
转动定理:
刚体在做定轴转动时,刚体的角加速度与它所受到的合外力矩成正比,与刚体的转动惯量成反比。 $M=J\alpha$ (力矩=转动惯量*角加速度)(在平动之中 $F=ma$ ,是不是感觉很相似呢)
推导过程: $J\alpha=\alpha\sum_{i=0}^{n}{m_{i} r_{i}^{2}}=\sum_{i=0}^{n}{\alpha m_{i} r_{i}^{2}}=\sum_{i=0}^{n}{F r_{i}}=M$ (这里的M是合力矩)
角动量守恒定理:
在平动中就讲了动量守恒,在所受合外力为0,或则内力远远大于合外力的时候物体的动量是保持守恒的。在刚体转动过程中也有这样子的性质,当刚体所受合外力的力矩为0的时候,也就是 $M=0$ 时, $L=J\omega$ 将会保持衡量,不会变化。(该定律不但适用于刚体,同样也适用于绕定轴转动的任意物体系统。 )
$M=0$ 的几种情况:
(1)合外力 $F$ 投影下来的 $F_{\bot}$ 为0。
(2)$F_{\bot}$ 与转动半径 $r$ 的夹角为0°。
推导过程:上次就讲了 $M=J\alpha$ 、 $L=J\omega$ ,而 $\alpha=\frac{d\omega}{dt}$ 。所以 $M=\frac{dL}{dt}$ 。所以 $\int_{t_{1}}^{t_{2}}Mdt=L_{t2}-L_{t1}$ 。当 $M=0$ 时, $\Delta L=0$ 。所以角动量守恒。书上的原话就是:在某一时间段内,作用在刚体上的外力的冲量矩等于刚体的角动量增量。(力矩对时间的积分就是冲量矩,角动量变化量就是角动量的增量)
角动量守恒的常见情况:
(1)转动惯量改变
假设人是一个圆柱(理想化一下),双臂张开的转动惯量 $J_{1}$ 肯定大于双臂收拢的转动惯量 $J_{2}$ ,在没有外力的情况下,一定会有 $\omega_{1}<\omega_{2}$ 。
(2)平动物体撞上刚体
1.力矩对刚体所做功的功率
公式:$P=M\omega$
单位:W
推导过程:对于合外力在极小的 $\Delta t$ 时间内所做的功,一定可以表示为: $dW=F \cdot ds=F \cdot sin\varphi \cdot rd\theta$ (高中数学公式: $ds=r \cdot d\theta$ 。又是两个向量相乘,所以要带上 $sin\varphi$ )
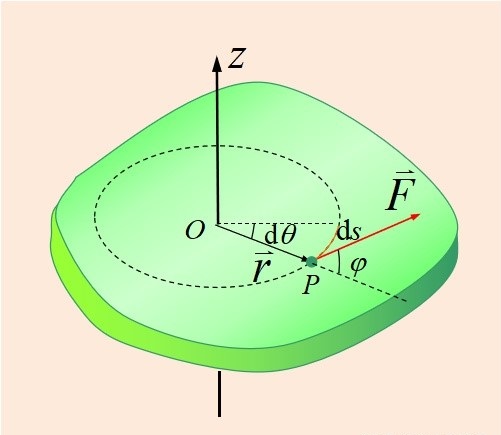
而又因为 $M=Fr \cdot sin\varphi$ ,所以 $dW=Md\theta$ 。所以 $P=\frac{dW}{dt}=M\frac{d\theta}{dt}=M\omega$
2.力矩对刚体所做的功
公式: $W=\int_{0}^{\theta}Md\theta$
单位:J
推导过程:上面讲功率已经推到了 $dW$ 。所以积分一下就可以了。
刚体转动的动能
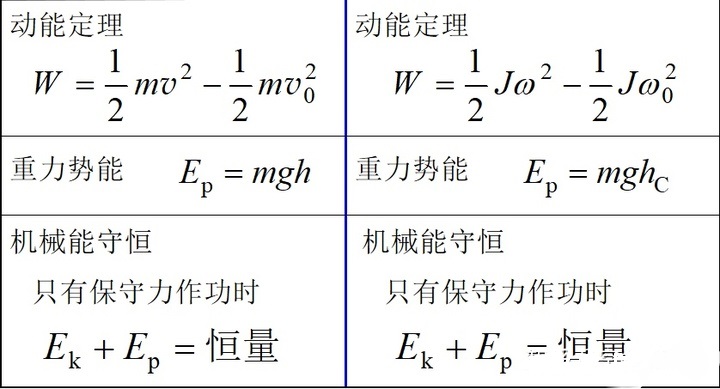
公式: $E_{k}=\frac{1}{2} J \omega^{2}$
单位:J
推导过程: $dW=Md\theta$ ,而 $M=J\alpha=J\frac{d\omega}{dt}$ 。所以两式联立,得 $dW=J\frac{d\omega}{dt} d\theta=J\frac{d\theta}{dt} d\omega=J\omega d\omega$ 。所以动能 $E_{k}=\int_{0}^{\omega}dW=J\int_{0}^{\omega}\omega d\omega=\frac{1}{2}J\omega^{2}$
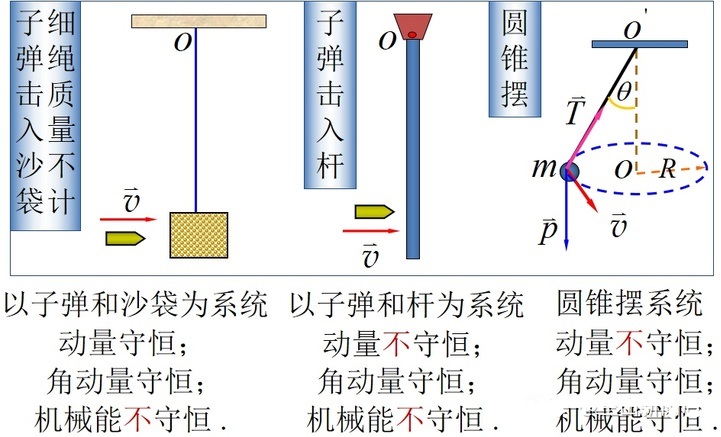
常见几种模型的各个量是否守恒:
刚体的重力势能
公式: $E_{p}=mgh_{c}$ ( $h_{c}$ 是刚体质心到零势面的高度)
单位:J
刚体的机械能守恒
公式: $E=E_{p}+E_{k}$
应用:如图,质量为m,长为l的均匀细棒绕过O点的转轴自水平位置以零角速度自由下摆。求细棒运动到与水平夹角为 $\theta$ 时的角速度;
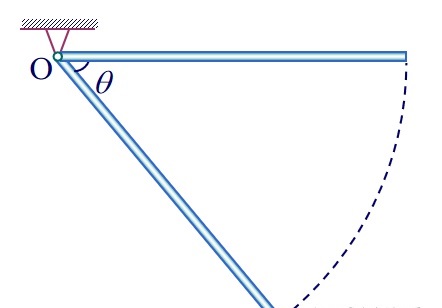
解:根据能量守恒,重力势能减小量是 $\Delta E_{p}=mg\cdot \frac{1}{2}l\cdot sin\theta$ 。动力势能增量是 $\Delta E_{k}=\frac{1}{2}J\omega^{2}$ 。而根据上次讲的,易知 $J=\frac{1}{3}ml^{2}$ 。所以: $\Delta E_{p}=\Delta E_{k}$ 。解方程: $mg\cdot \frac{1}{2}l\cdot sin\theta = \frac{1}{6}ml^{2}\omega^{2} \Rightarrow \omega^{2}=\frac{3g sin\theta}{l} \Rightarrow \omega=\sqrt{\frac{3g sin\theta}{l}}$
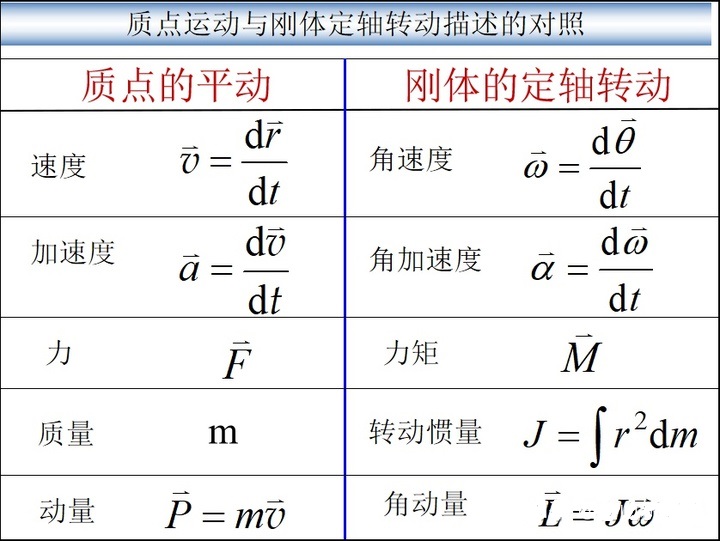
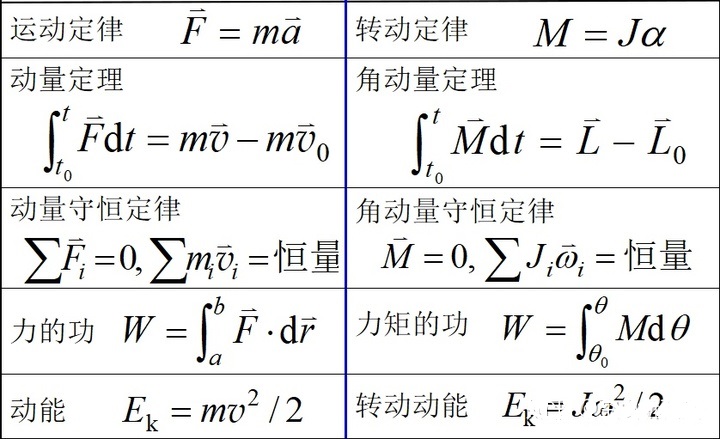
在前面研究公式的时候,我们就发现了许多平动与刚体转动公式之间的惊人的相似 。就好像被人刻意设计过一样。下面把两边的公式总结并且类比一下。

This is an identification card as an honored membership of FeynmanDirac
Happy to see you follow FeynmanDirac, enjoy science together
 验证码启动中...
验证码启动中...
备用人机验证